WELCOME TO THE FUTURE OF CHESS
Project Overview
Project Abstract
The goal of this project was to create a smart chess board. Everytime a chess piece is picked up our chess board will calculate the pieces available moves and light up specific moves. It will take into account board boundries and other chess pieces so that there are no illegal moves as well as display when the specific piece is able to capture an opponents piece. Laslty the board will notify the player when their King is in check and when they are in Check Mate losing the game.
Project Motivation
We wanted to create this as our Microps final project because we thought this could make chess more accessible to younger people or those unfamiliar to the game of chess. There are many pieces in chess with different move patterns. New players often overlook all the possible moves that they could make with each piece and when you can capture opposing pieces. Lastly on of the hardest parts of chess that takes experience is knowing when you are in check. Our board will help aid new players and allow them to get into the game of chess. We thought that we could use the skills we learned in Microps to bring this idea to life.
System Design
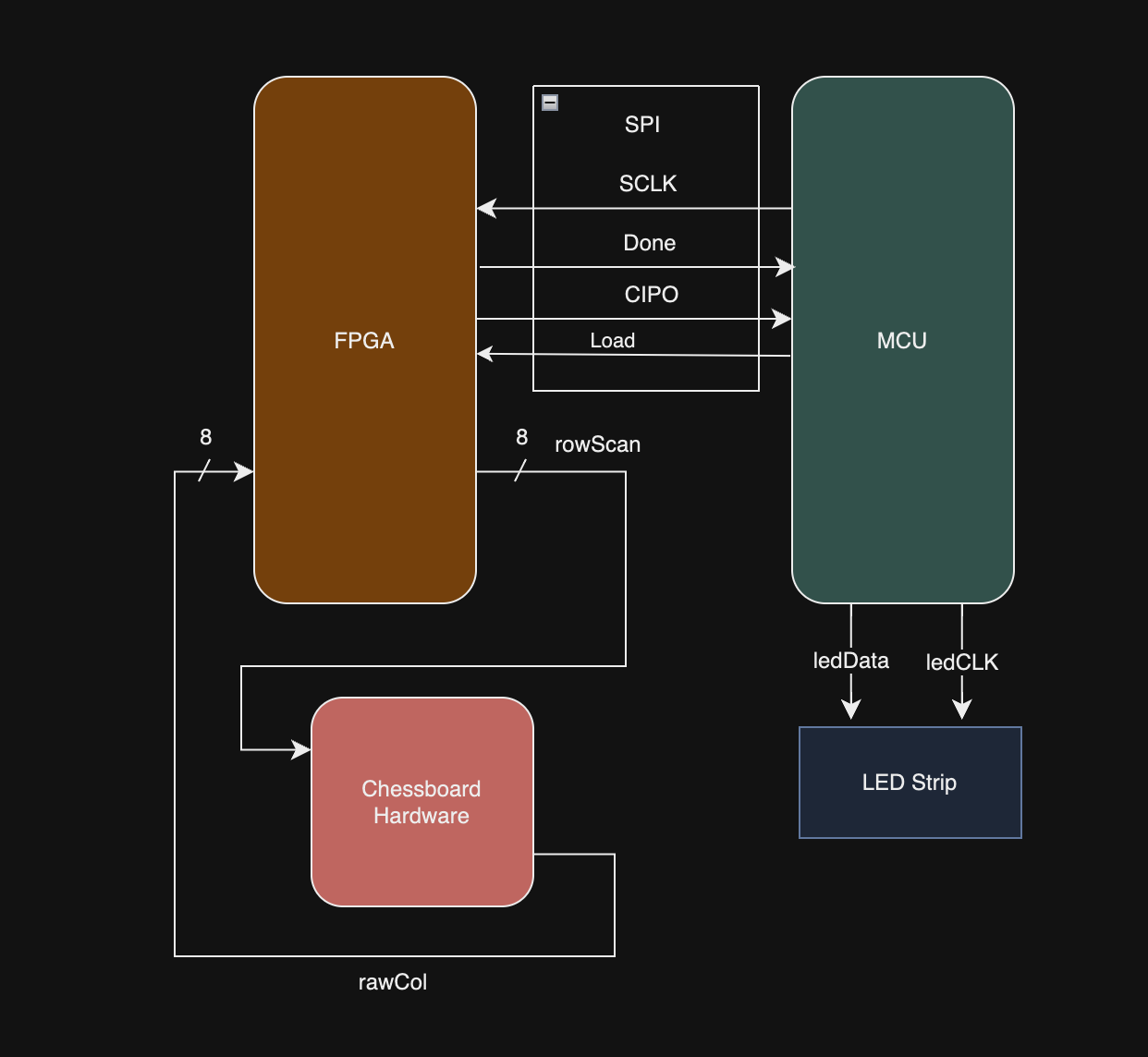
To sense when pieces are picked up. Digital hall effect sensors are used that sense a magnetic field. Each piece will be fitted with a magnet so that when it is lifted the hall effect sensors will sense a change in magnetic field and our system will be able to control the individually adressable LEDs to light up available moves and captures. In our design the FPGA is responsible for controlling 64 hall effect sensors powering them on and recieving board data from them. It will then use SPI to send the data over to the MCU. From there the MCU will control the individually addressable LED’s lighting up specific colors.
New Hardware
One part of this class was using new hardware that we had not previously used in this class. We decided to use two new pieces of hardware: a digital hall effect sensor and individually addressable LED’s.
Hall Effect Sensor
The hall effect sensor we decided to use was a smt digital hall effect sensor shown below. This sensor while simple allowed us to sense when a magnetic field was in range. We wanted to have one of these underneath each chess tile in the board. Our plan was wire them in a matrix similar to how keypad scanners are wired allowing use to power one row at a time and read the 8 hall effect sensors through the columns. However using 64 different hall effect sensors lead to some parasitic power and voltage loss across the columns that we had to deal with in interesting ways. One additional challenge was making sure that each magnet was calibrated so that it would onyl trigger the specific hall effect under the tile but not the neighboring hall effect sensors. This was done by using 3D printed calibration disk to elevate the magnet off the board.
Individually Addressable LED
The other new hardware we used was this roll of Individually addressable LED’s that we found in the lab. There was no data sheet for this model of LED’s making it a fun challenge of trying to program them to display specific colors. We were able to find the data sheet of the newer version of the LED’s and go off that. In order to code the LED strip we ended up bitbanging the specific protocol by creating our own clock using a GPIO pin and changing the data on the falling edge similar to SPI. This ended up working extremely well and we ended up being able to set any LED to any RGB color we could think of.
